BAlternatief B: Panorama Tap
Beschrijving van de interactie
Na de plattegrond-aanpak van Alt A wilde ik een andere richting verkennen die de kamer toont zoals je hem ziet, niet als abstracte kaart van bovenaf. Funda biedt bij veel woningen al 360°-foto's aan. Professioneel geschoten panorama's waarmee je vanuit één standpunt de hele kamer kunt rondkijken. Die data ligt er al.
Bij dit alternatief opent de bezoeker de 360°-foto's van de woning in de Funda-app, selecteert de kamer waar het gebrek zit, en navigeert door het panorama met swipes. Ziet hij de vochtplek? Dan tikt hij er gewoon op, in de 360°-foto. Er verschijnt een menu met drie opties (Vocht, Schade, Opmerking) en na selectie staat er een anker-icoon op die exacte plek in het panorama.
De interactie is egocentrisch (Klatzky, 1998): de bezoeker bekijkt de kamer vanuit het standpunt van de fotograaf, alsof hij er zelf staat. De interface IS de kamer en niet een abstracte plattegrond van bovenaf, maar de muren, het plafond, de vloer, precies zoals je ze ziet als je rondkijkt. Dat is wat d'Silva (2019) bedoelt met Spatial Interfaces: "A great spatial interface meets our expectations of a physical model."
Het verschil met Alt A is dat de Gulf of Execution aanzienlijk kleiner is. De bezoeker hoeft niet te navigeren op een abstracte 2D-kaart, maar ziet de kamer in perspectief en tikt op het gebrek. Er is wel een korte oriëntatiestap want je moet de juiste plek in het panorama vinden — maar die stap is intuïtief omdat de 360°-foto de kamer toont zoals je hem kent.
En thuis op de bank opent de bezoeker dezelfde 360°-foto's en ziet alle ankers op hun originele posities. De 360°-foto's zijn de ruimtelijke context professioneel geschoten, hoge resolutie, rijke visuele details. De bezoeker ziet het gebrek in de context van de kamer, en kan rondkijken om zich te oriënteren.
Theoretische onderbouwing
Direct Manipulation (Shneiderman, 1983)
Het kernidee blijft simpel: de beste interface is er eentje waarbij je het gevoel hebt dat je het ding zelf aanraakt. In dit alternatief tikt de gebruiker op het gebrek in het panorama. De actie is direct en herkenbaar: je wijst iets aan in een beeld dat de kamer toont zoals je hem ziet. Niet zo direct als tikken in een live camera-feed, maar aanzienlijk directer dan een pin plaatsen op een abstracte 2D-kaart.
Spatial Interfaces & Natural Mapping (d'Silva; Norman, 2013)
Norman schrijft over Natural Mapping: de relatie tussen wat je doet en wat er gebeurt moet zo direct mogelijk zijn. In de 360°-foto is die mapping sterk. De bezoeker ziet de keuken zoals hij die in het echt ziet: dezelfde muren, hetzelfde aanrecht, dezelfde hoek. Tikken op de vochtplek in het panorama = markeren van die plek. Er zit een kleine vertaalstap in want de bezoeker moet de plek in de foto matchen met wat hij in de echte kamer ziet, maar die stap is veel kleiner dan bij Alt A, omdat het perspectief overeenkomt.
Recognition vs. Recall & Dual Coding (Budiu, 2014; Paivio, 1991)
Het terugkijken via 360°-foto's combineert twee sterke geheugenprincipes. Ten eerste: Recognition want de bezoeker ziet het gebrek in de volledige visuele context van de kamer, niet als abstracte pin op een kaart. Ten tweede: Dual Coding want de 360°-navigatie activeert zowel het ruimtelijke geheugen (je draait door de kamer, oriënteert je) als het visuele geheugen (je ziet de muur, de tegels, het aanrecht). Die combinatie maakt de herinnering sterker dan bij een plattegrond (alleen ruimtelijk-abstract) of bij losse foto's (alleen visueel, zonder ruimtelijke navigatie).
Flow-behoud & fysieke belasting
De bezoeker hoeft de telefoon niet continu omhoog te houden. Er is geen camera die constant moet draaien. De bezoeker kijkt normaal rond in de kamer, pakt de telefoon erbij als hij een gebrek ziet, opent de 360°-foto, markeert het gebrek, en legt de telefoon weer weg. De Flow (Csikszentmihalyi) wordt kort onderbroken, maar niet permanent doorbroken. De bezichtiging blijft primair een fysieke ervaring, niet een scherm-ervaring.
Afhankelijkheid van bestaande data
De zwakte van dit alternatief is de afhankelijkheid van Funda's 360°-foto's. Niet alle woningen hebben ze. En de foto's zijn op een bepaald moment gemaakt dus als de eigenaar sindsdien heeft verbouwd of de vochtplek is nieuw, dan klopt de foto niet meer met de werkelijkheid. De bezoeker moet dan mentaal matchen: "Dit is de muur waar ik nu sta, maar in de foto staat er nog een kast." Die discrepantie kan verwarrend zijn.
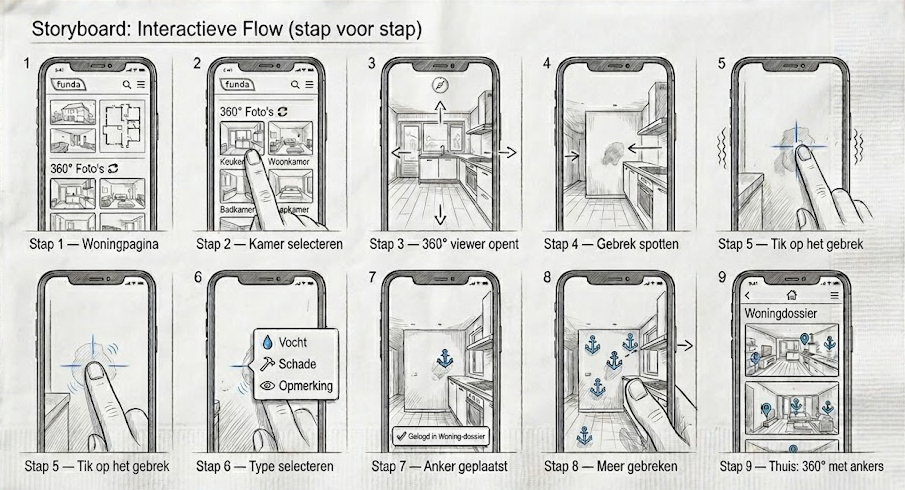
Interactieve Flow (stap voor stap)
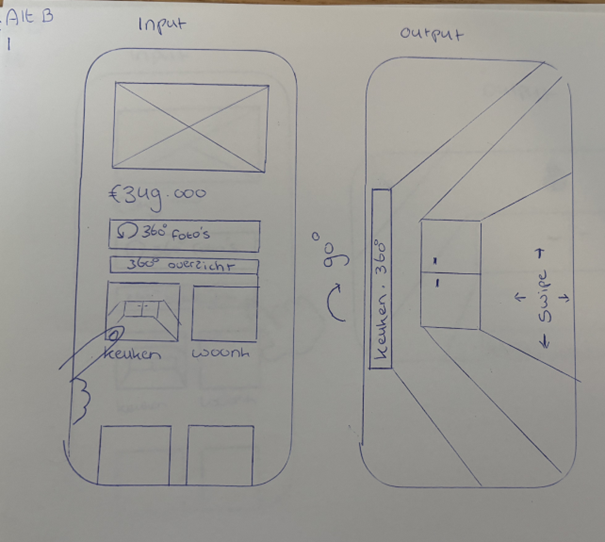
- Stap 1 — Woningpagina: De bezoeker opent de Funda-app en ziet de woningpagina. Naast de
reguliere foto's en plattegrond staat een prominente sectie "360° Foto's 🔄" met thumbnail-previews per
kamer. De 360°-icoon communiceert direct dat je een ruimtelijke ervaring kunt verwachten.
Signifiers (Norman): de icoon en de kamer-thumbnails maken de beschikbare actie zichtbaar zonder uitleg. - Stap 2 — Kamer selecteren: De bezoeker tikt op "360° Foto's". Een overzicht verschijnt
met thumbnails per kamer (Keuken, Woonkamer, Badkamer, Slaapkamer). De bezoeker selecteert "Keuken" en de
kamer waar hij zojuist de vochtplek zag. De thumbnails activeren herkenning: de bezoeker ziet
welke kamer het is.
Recognition (Budiu): de kamer-thumbnails activeren herkenning, niet actieve herinnering. De bezoeker hoeft niet te onthouden hoe de plattegrond eruitziet. - Stap 3 — 360° viewer opent: Het fullscreen panorama van de keuken verschijnt. De
bezoeker kan met swipes rondkijken: links, rechts, omhoog, omlaag. Een subtiel kompas-icoon bovenaan toont
de kijkrichting. De bezoeker ziet de keuken vanuit een egocentrisch perspectief alsof hij er
staat.
Spatial Interfaces (d'Silva): de interface toont de ruimte zoals je hem ervaart. Egocentrisch perspectief (Klatzky, 1998) in tegenstelling tot Alt A's allocentrisch bovenaanzicht. - Stap 4 — Gebrek spotten: De bezoeker swiped naar de muur naast het aanrecht en ziet de
vochtplek in de 360°-foto. Hier is de korte oriëntatiestap: de bezoeker matcht wat hij in de echte kamer
ziet met het panorama. Omdat de foto de kamer toont vanuit hetzelfde perspectief, is dit intuïtief.
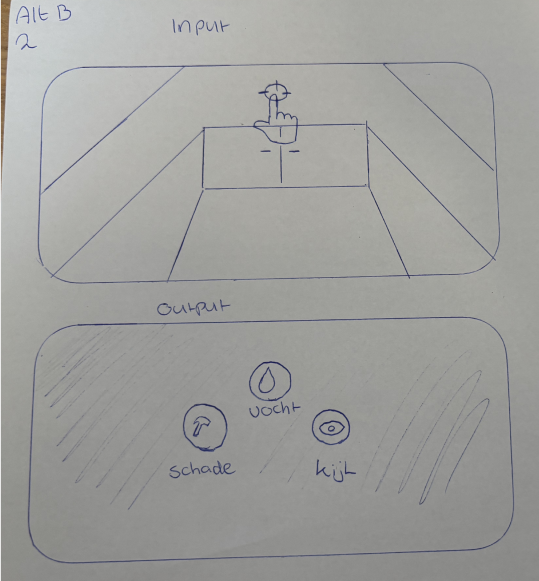
Natural Mapping (Norman): de 360°-foto toont de kamer zoals je hem ziet. De vertaalstap is klein want het is dezelfde muur, dezelfde hoek en dit is veel kleiner dan de 3D→2D vertaling bij Alt A. - Stap 5 — Tik op het gebrek: De bezoeker tikt op de vochtplek in het panorama. Een
subtiel crosshair verschijnt op het tikpunt en kleurt blauw. Een korte haptische trilling bevestigt de
registratie.
Direct Manipulation (Shneiderman): tikken OP het gebrek in het panorama. De Gulf of Execution is klein maar niet perfect 1:1 zoals in een live camera, maar veel kleiner dan bij Alt A. - Stap 6 — Type selecteren: Rondom het tikpunt verschijnt een menu met drie opties: 💧
Vocht, 🔨 Schade, 👁️ Opmerking. De opties zitten rondom de exacte tiklocatie zodat de bezoeker niet hoeft
weg te kijken.
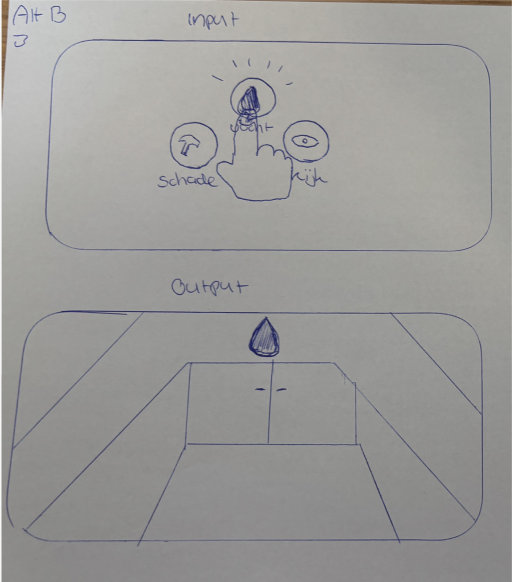
Fitts' Law: het menu verschijnt op het tikpunt, niet elders op het scherm. Minimale afstand tot de target. - Stap 7 — Anker geplaatst: De bezoeker selecteert "💧 Vocht". Het menu verdwijnt, en op
die plek verschijnt een blauw anker-icoon dat in het panorama blijft staan. Het beweegt mee als je verder
swiped. Een toast bevestigt: "✅ Gelogd in Woning-dossier". Door naar het volgende gebrek, nul navigatie.
Spatial Interface (d'Silva): het anker zit IN de ruimtelijke context. Feedback (Norman): toast + visueel anker bevestigen samen de actie. - Stap 8 — Meer gebreken: In dezelfde 360°-foto of in een andere kamer kan de bezoeker
meer gebreken markeren. Het patroon herhaalt zich identiek: swipe naar gebrek → tik → type → anker.
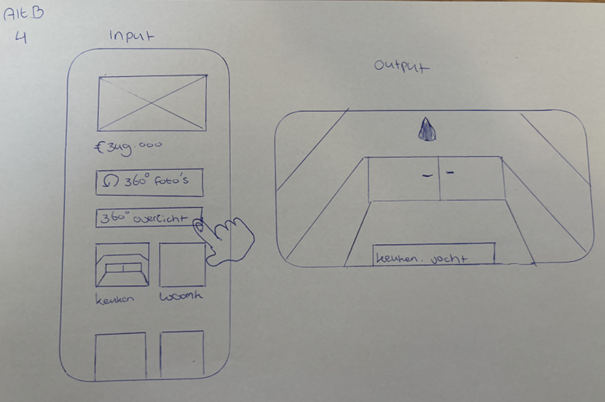
Consistency (Nielsen): identiek herhalend patroon. De gebruiker leert het na één cyclus. - Stap 9 — Thuis: 360° met ankers: Na de bezichtiging opent de bezoeker het
woningdossier. De 360°-foto's zijn beschikbaar met alle ankers op hun originele posities. De bezoeker
navigeert door het panorama en ziet precies waar elk gebrek zat en dit in de volledige visuele context van
de
kamer. De foto's zijn professioneel geschoten: hoge resolutie, goede belichting, rijke context.
Recognition (Budiu): maximaal want de bezoeker ziet het gebrek in de volledige visuele + ruimtelijke context. Dual Coding (Paivio): ruimtelijke navigatie + visuele rijkheid gecombineerd.
Schetsen: Wisselwerking Mens ↔ Product
De wisselwerking bij Alt B draait om navigatie in bestaande 360°-foto's. De bezoeker hoeft geen eigen scan of foto te maken want het materiaal ligt er al. Per gebrek zijn dat 3 stappen (swipe naar plek + tik op gebrek + selecteer type).
Markeren: ~40s actief bij 5 gebreken (telefoon normaal vast) | Terugkijken: 360° panorama thuis
Storyboard
Onderstaand storyboard toont de volledige interactieflow van Alt B: van het openen van de 360°-foto's tot het terugkijken van geplaatste ankers thuis.
Waarde van dit alternatief voor het ontwerp
Waarom deze theorie relevant is
Alt B is gebouwd op het idee van Spatial Interface Design (d'Silva, 2016): als de representatie van de ruimte overeenkomt met hoe je de ruimte ervaart, dan valt de vertaalstap weg. Bij Alt A zagen we dat de 3D→2D vertaalslag (Gulf of Execution, Norman) de bottleneck is. Alt B pakt dat aan door de bezoeker in dezelfde visuele ruimte te laten werken. Daardoor wordt de executie-kloof een stuk kleiner want de bezoeker tikt gewoon op het gebrek dat hij ziet.
Direct Manipulation (Shneiderman, 1983) past hier goed bij omdat de interactie aan alle drie criteria voldoet: (1) je ziet het object continu, (2) je doet fysieke acties, en (3) je krijgt directe feedback. De bezoeker tikt op een vochtplek in de foto en niet op een abstracte kaart, niet via een camera, maar gewoon recht op het gebrek. Van de drie alternatieven is dit de meest directe manier van interactie.
Dual Coding Theory (Paivio, 1991) voorspelt dat de combinatie van ruimtelijke navigatie (swipen door de 360°-foto) én visuele context (het gebrek in hoge resolutie) een sterkere herinnering oplevert dan elk kanaal apart. Dit is relevant omdat het verklaart waarom het overzicht achteraf bij Alt B theoretisch sterker zou moeten zijn dan bij Alt A (alleen abstracte kaart) want de bezoeker navigeert thuis door dezelfde ruimte en ziet de ankers op hun originele posities.
Waarde voor het ontwerp
Alt B is het middenalternatief dat de balans zoekt tussen directheid en haalbaarheid. Het lost het kernprobleem van Alt A op (de 3D→2D vertaalslag) zonder de complexiteit van AR-technologie te introduceren. De 360°-foto's bestaan al op Funda en er hoeft geen nieuwe technologie te worden ontwikkeld, alleen een interactielaag bovenop bestaande media.
De unieke waarde is de egocentrische interface: de bezoeker ervaart de ruimte vanuit zijn eigen standpunt, niet vanuit een bovenperspectief. Dit sluit aan op het referentiekader van Klatzky (1998): egocentrische representaties matchen beter met de fysieke ervaring dan allocentrische. Het concept bewijst dat Spatial Anchoring niet afhankelijk is van de telefoon-camera (zoals bij Alt C), maar kan werken via bestaande professionele fotografie.
De zwaktes heb ik bewust benoemd: je bent afhankelijk van of er 360°-foto's op Funda staan, en foto's kunnen verouderd zijn na verbouwingen. Dat zijn dingen om mee te nemen naar de convergentie want ze bepalen wanneer dit alternatief wel en niet goed werkt.